![]()
■研究について
ヒューマノイド「ドットちゃん」を開発。
人間とロボットの協調作業。
物体の機能に注目した作業の解析(言語化)、およびタスクモデルの構築。
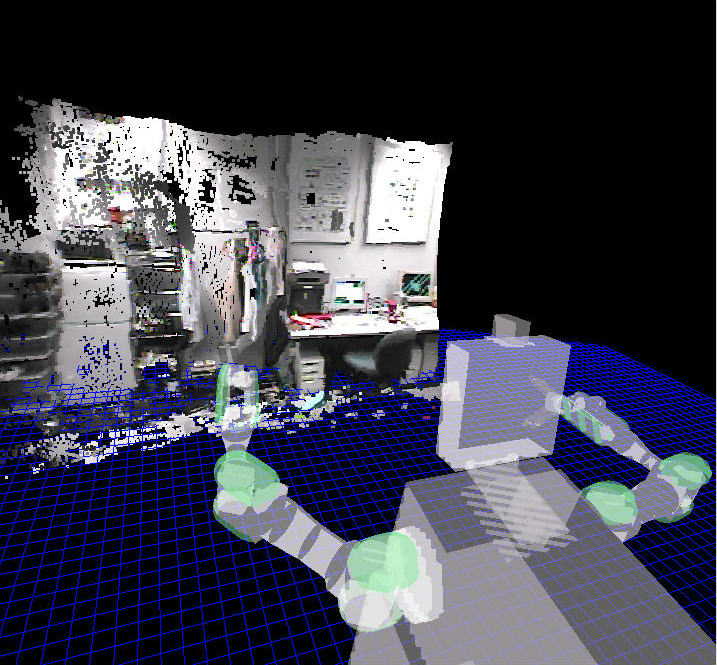
3次元物体追跡。
■研究計画 (まとめ中)
■ドットちゃんのおもちゃ
幾何モデルはModelaのMDX-20を使って物理的に取得。
テクスチャマッピング@CVLのソフトを使って色を貼り付け。
見え方による色の違いを使って、3次元追跡をロバストにできるようにするつもり。
テクスチャを使うことで、軸対象の物体などの姿勢の特定ができるようになる(予定)。
ペンチの稼動部分はどうやって認識しようか。
IBM ホームページビルダーV6.5のおまけのソフトを使ったデモ
1.ドライバー
2.スパナ
3.のこぎり
4.ペンチ
5.ハンマー
■過去の発表文献
RSJ2001発表予定
物体機能に基づくロボットの動作記述と実装
Descriotion and implementation of robot operation based on the object functions
レジュメ(PDF:239Kbyte)
Robomech2001発表
人間の教示動作の視覚処理に基づく物体機能の抽出
Extraction of functions
of objects through observation of human demonstrations
レジュメ(WORD521KByte)
ポスター(Pdf5692Kb)
リアルタイム3Dトラッキングデモ(MPG3743kb)
2000年ロボット学会
教示動作の視覚処理に基づく物体の機能情報の抽出
レジュメ(WORD323Kbyte)
発表資料(PPT1164Kbyte)
ロボコンマガジンNo.9 p66-69 日本ロボット学会協力企画 世界のロボット紹介
ロボティクスってなーんだ?!(その2)「ロボットとコンピュータビジョン」
雑誌に掲載された読み物です。
■大学内・研究室内発表文献・プレゼンテーション
2002年7月9日 高瀬・木村研合同輪講資料
The Visual Analysis of Human Movement: A Survey
D. M. Gavrila, Computer Vision and Image Understanding Vol. 73, No. 1,
January, pp.82-98, 1999
人間動作の視覚解析:サーベイ
2001年2月修士学位論文
ロボットによる物体機能認識のための視覚処理の研究
レジュメ(WORD1792KByte)
発表資料(PPT4469KByte)
2000年7月25日高瀬・木村研合同輪講資料
Function From Motion
物体の動きから機能を選択する。関連研究までは面白い。
2000年4月5日平成12年度情報システム運用学専攻修士論文中間発表会要旨
ロボットによる道具の使い方の研究
レジュメ(WORD176Kbyte)
発表資料(PPT448KByte)
1999年12月21日高瀬・木村研合同輪講資料
Visual Determination of 3D Grasping Points on Unknown Objects With a Binocular
Camera System
未知の物体のグラスピング戦略を見かけ上の中心軸を使って行う話。